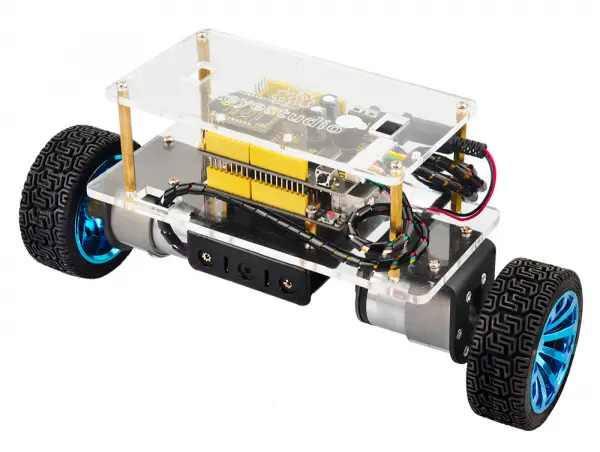
Robot - Self-balancing Car Keyestudio KS0193
The Keyestudio Balance Car Kit is a DIY project that allows you to build a self-balancing two-wheel robot based on the Arduino platform. Featuring the MPU-6050 gyro and accelerometer module, it offers real-time posture detection. The kit supports Bluetooth communication with Android devices for wireless control via button or gravity sensor modes, with options to adjust balance angle and PID parameters for full control over the car’s behavior.
The Keyestudio Balance Car Kit is a DIY project that enables you to build a self-balancing two-wheel robot based on the Arduino platform. At its core is an Arduino UNO R3 and a specialized balance shield featuring the MPU-6050 gyro and accelerometer module to detect posture in real time.
The kit supports Bluetooth communication with Android devices, allowing wireless control through an app with button mode and gravity sensor mode. It also provides options to adjust the balance angle and PID parameters, giving you complete control over the car’s behavior.
Features
Motor and Control Hardware
Working Voltage: DC 9–12V
Motor Driver: TB6612FNG
Balance Detection Sensor: MPU-6050
Power and Bluetooth switches onboard
Bluetooth Functionality
Compatible with Bluetooth XBee module
Control via Android app with:
Button control
Gravity (tilt) control
Real-time adjustment of balance and PID parameters
Complete Kit with Instructions
All components are included
Step-by-step assembly and debugging guide provided
Specifications
| Specification | Value |
|---|---|
| Motor Driver Chip | TB6612FNG |
| Posture Detection | MPU-6050 |
| Operating Voltage | DC 9–12V |
| Control Modes | Button / Gravity (via app) |
| Adjustable Settings | Balance angle, PID parameters |
Pinout
| Pin | Function |
|---|---|
| G | Ground |
| V | Voltage |
| S | Signal |
| TX | Serial transmit |
| RX | Serial receive |
| SCL | I2C clock |
| SDA | I2C data |
| MOSI | SPI master out, slave in |
| MISO | SPI master in, slave out |
| SCK | SPI clock |
Package Includes:
| No. | Component | Quantity |
|---|---|---|
| 1 | Dual-pass M3*45mm hex copper pillar | 4 |
| 2 | Dual-pass M3*10mm hex copper pillar | 4 |
| 3 | Black M4*6 cross screw | 2 |
| 4 | M3*6mm round head screw | 6 |
| 5 | M3*8mm round head screw | 10 |
| 6 | M3*8mm flat head cross screw | 4 |
| 7 | M3*12mm flat head cross screw | 2 |
| 8 | M3*12mm round head screw | 10 |
| 9 | M3 nickel-plated nut | 12 |
| 10 | Acrylic plate (2 pieces) | 1 pack |
| 11 | Wheels (68mm diameter x 26mm thickness, black+blue) | 2 |
| 12 | GM37-520 DC gear motor with hall encoder (12V, 1:30) | 2 |
| 13 | 6mm hole * 18mm copper hex coupler | 2 |
| 14 | Double-head 6-pin PH2.0 30cm connector wire | 2 |
| 15 | Phillips screwdriver (yellow-black, 3*40mm) | 1 |
| 16 | Type L M2 inner hex wrench (nickel-plated) | 1 |
| 17 | 18650 battery case (3 cells, AA size, with 15cm lead+plug) | 1 |
| 18 | Keyestudio Balance Shield V3 (black, eco-friendly) | 1 |